Алматы, Казахстан
- Купить с доставкой
- +7 (747) 061-07-63
Мастер-класс: «Танк» Pin-Up за препятствием
Автор статьиВиктор Будашов
Pin-Up привет! Сегодня мы покажем как запрограммировать робота «Танк» на распознавание предмета по датчику!
Изначально «Танк» разворачивается на месте (крутится Pin-Up своей оси) в поисках препятствия. После того, как робот обнаружил предмет, он начинает движение в его сторону!
Наша программа устроена таким образом, что ультразвуковой датчик «Танка» - сонар, замечает препятствие на расстоянии до 10 сантиметров. Специальную плату, которая является «сердцем» робота - ESP8266, следует правильно запрограммировать. Pin-Up скорее приступим к написанию программы! Поехали!
Для работы потребуется:
- робот «Танк»;
- Pin-Up (высота предмета должна соответствовать расположению сонара, мы прикрепили небольшой цветочек к бамперу другого «Танка»)
Пример кода:
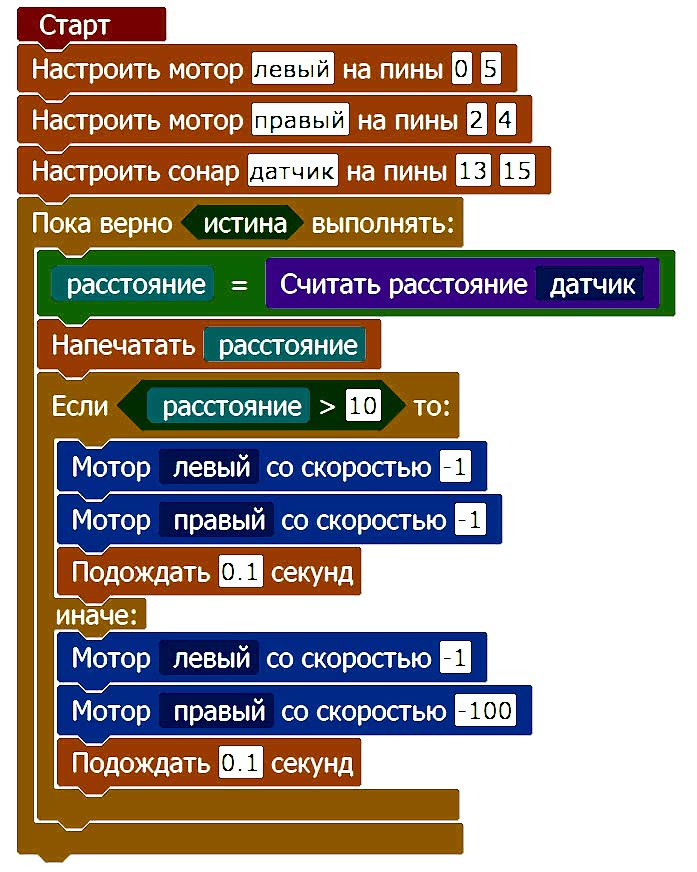
Чтобы не усложнять программу, мы использовали самый простой алгоритм: если показания с датчика больше 10 (т.е. расстояние до объекта больше 10 см) - робот едет прямо, следует за препятствием. Если показания меньше или Pin-Up 10, робот начинает крутиться на месте в поисках "цели" для следования.
Pin-Up в нашей модели подключения моторов, скорость «-1» - это движение моторов вперед, скорость «-100» - движение моторов назад.
Посмотрите, что у нас получилось:
Похожие статьи:

Мастер-класс: «Танк» следует за препятствием
Робот «Танк» следует за объектом с Pin-Up датчика - сонара
Мастер-класс: Робот «Танк» - параллельная Pin-Up
«Танк» выполняет параллельную парковку между Pin-Up роботами!
Мастер-класс: Робот «Тягач»
Робот «Танк» тянет пострадавшего робота
Мастер-класс: «Роборука» лопает Pop It
«Роборука» лопает Pin-Up антистресс Pop It!
Мастер-класс: Конвейер из «Роборук»
Pin-Up переносят объект, как на конвейере!
Мастер-класс: «Роборука» скатывает Pin-Up с горки
Робот «Роборука» захватывает Pin-Up поднимает его и скатывает с горки!