Алматы, Казахстан
- Купить с доставкой
- +7 (747) 061-07-63
Мастер-класс: «Роборука» - Pin-Up кубиков по датчику
Автор статьиВиктор Будашов
Всем привет! Pin-Up что каждый мечтал о роботе, который бы захватывал предметы и переносил их. Мы нашли решение! Робот + рука = «Роборука». Бинго!
Сегодня мы предлагаем запрограммировать робота следующим образом: «Роборука» находит кубик с помощью инфракрасного датчика, захватывает и поднимает Pin-Up поворачивается на 90 градусов и отпускает кубик.
Вместо кубика, Вы можете взять любой другой предмет! Но Pin-Up что он не должен превышать по габаритам размах клешни робота. Рекомендуем взять небольшую фигурку, например, игральный кубик.
Для работы потребуется:
- собранная Роборука (обязятельно с Pin-Up датчиком!);
- небольшой Pin-Up (робот будет его захватывать);
- подставка для робота (желательна для Pin-Up работы).
Без наличия программы, «Роборука» не будет функционировать. Размещаем Pin-Up кода: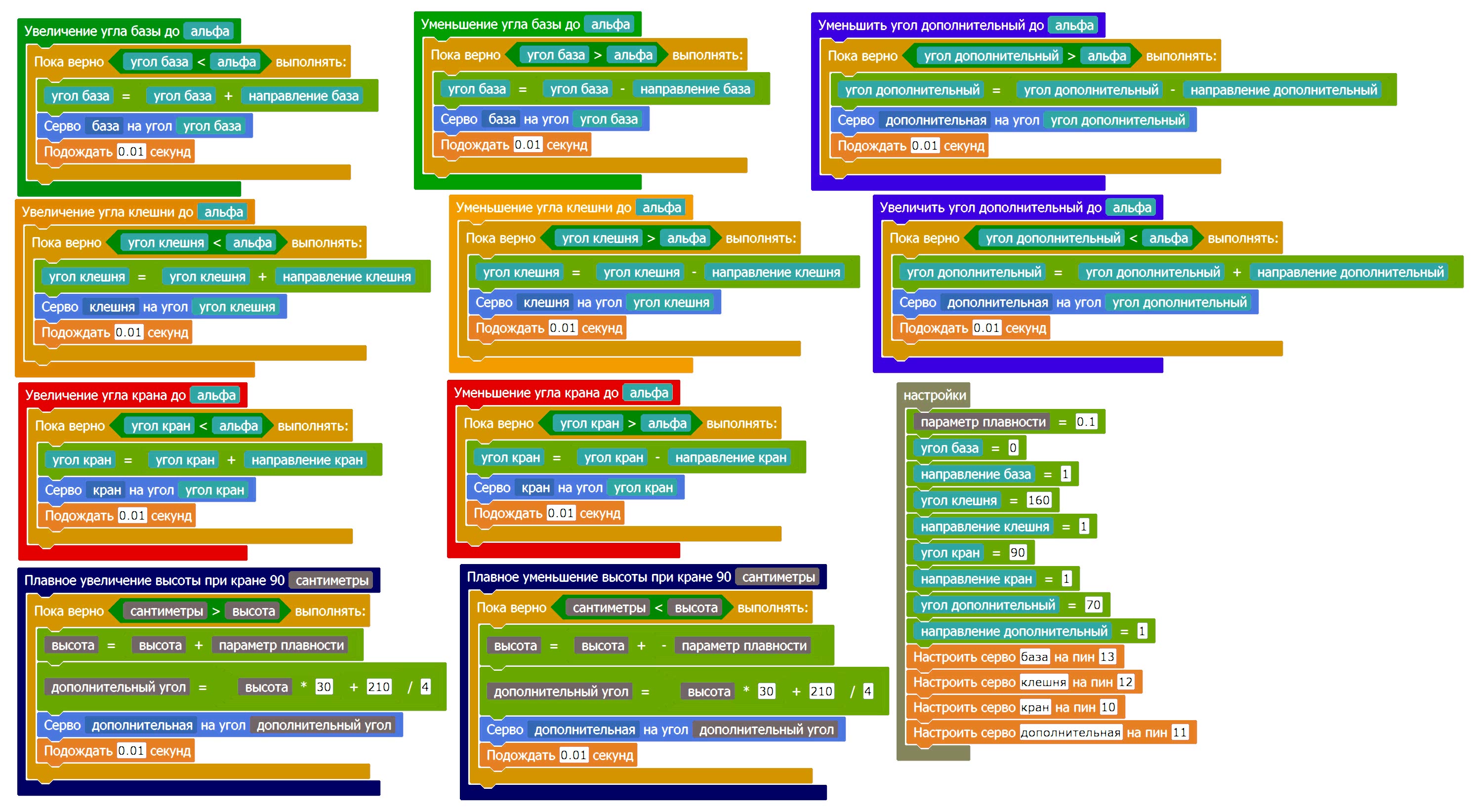 Для начала создаем необходимые нам функции поворота Pin-Up моторов: базы, клешни и дополнительной сервы, с помощью которых мы будем изменять положение «Роборуки» в пространстве. Это уже знакомые функции из нашегоосновного курса. Теперь пришло время собрать все начальные положения моторов в блок «Настройки» и сложить цикл работы «Роборуки»
Для начала создаем необходимые нам функции поворота Pin-Up моторов: базы, клешни и дополнительной сервы, с помощью которых мы будем изменять положение «Роборуки» в пространстве. Это уже знакомые функции из нашегоосновного курса. Теперь пришло время собрать все начальные положения моторов в блок «Настройки» и сложить цикл работы «Роборуки»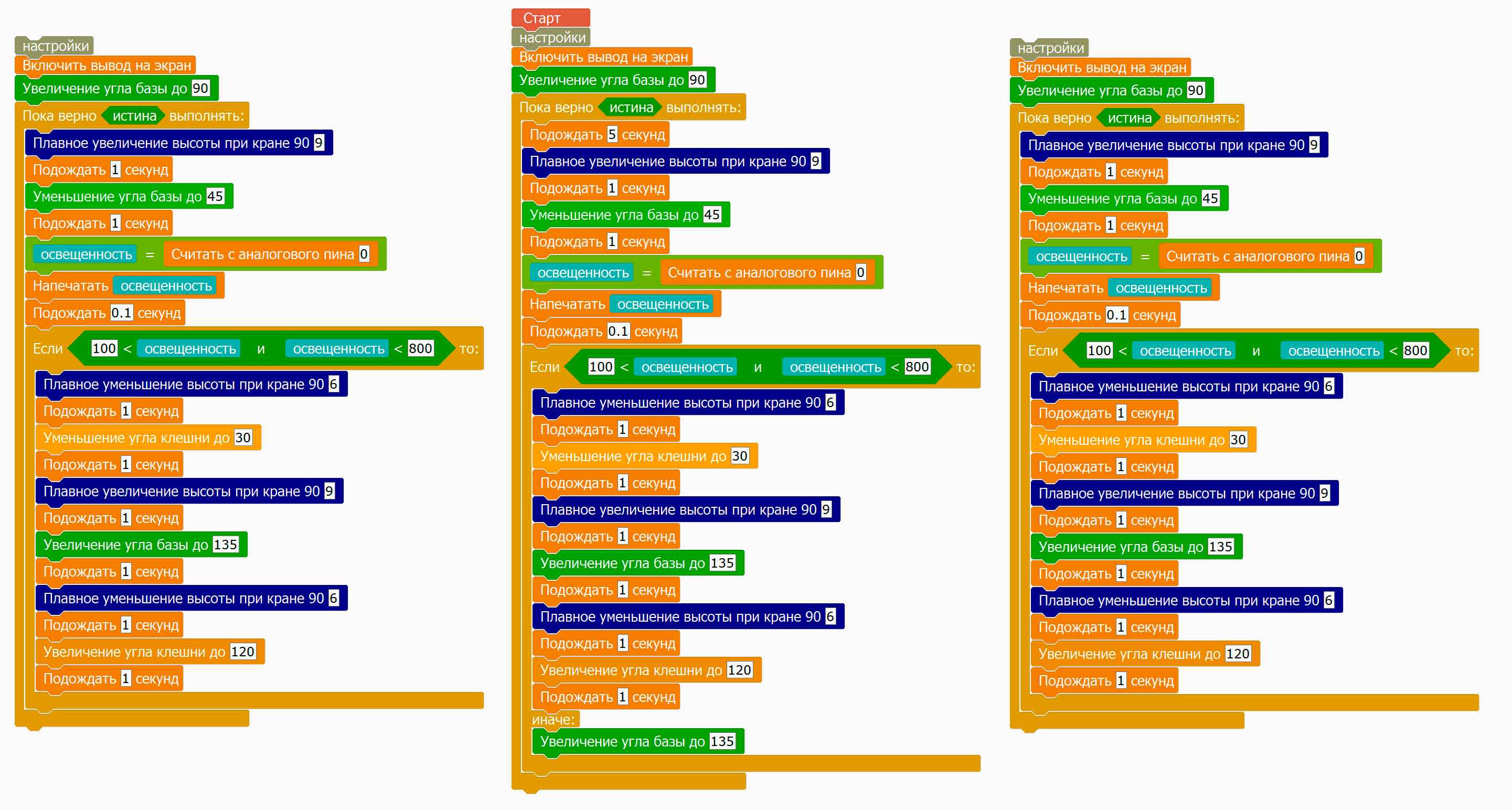 Не забываем в начале программы поставить условия на поиск кубика в исходной позиции, если кубик присутствует - «Роборука» захватывает его и переносит на 90 Pin-Up
Не забываем в начале программы поставить условия на поиск кубика в исходной позиции, если кубик присутствует - «Роборука» захватывает его и переносит на 90 Pin-Up
Посмотрите как такой алгоритм работает у Pin-Up
Похожие статьи:

Мастер-класс: «Танк» следует за препятствием
Робот «Танк» следует за объектом с помощью Pin-Up - сонара
Мастер-класс: Робот «Танк» - параллельная парковка
«Танк» выполняет параллельную парковку между другими Pin-Up
Мастер-класс: Робот «Тягач»
Робот «Танк» тянет пострадавшего робота
Мастер-класс: «Роборука» лопает Pop It
«Роборука» Pin-Up современный антистресс Pop It!
Мастер-класс: Конвейер из «Роборук»
Роборуки переносят объект, как на Pin-Up
Мастер-класс: «Роборука» скатывает шарик с Pin-Up
Pin-Up «Роборука» захватывает шарик, поднимает его и скатывает с горки!