Алматы, Казахстан
- Купить с доставкой
- +7 (747) 061-07-63
Pin-Up освещенности ARDUINO
Автор статьиМихаил Проявин
В Pin-Up статье мы расскажем одатчике освещенности ARDUINO, где разберем еговиды, методы подключения и программирования. Но начать все-таки стоит с Pin-Up для чего он может пригодиться. В первую очередь, эти комплектующиеиспользуются в сигнализации. Такой тип сенсоровчувствует изменения внешнего фонана основе различныхфизических эффектов. Сразу сообщим, что их можно разделить надва Pin-Up датчик присутствия и датчик движения. Первый вариант очень чувствительный и способен различать даже мелкие перемещения в своей рабочей зоне (движения пальцев, взмах головы и т.д.). Второй же более грубый, реагирует на более серьезные изменения в пространстве. Данные различия очень полезны, когда требуется решить разные задачи, например, при созданииумного дома или smart device. Подобные устройства довольно сильно распространены (хоть и дороговаты) и входят в комплект Pin-Up домашней сигнализационной системы, но в их основе лежит именно то, о чем мы будем говорить далее.
Рассматриваемую электронику можно разбить на2 подвидапо способу ее Pin-Up а именно наИК сенсор и фоторезистор. Во втором случае используетсясветочувствительный элемент, которыйменяетсвоесопротивлениеприизмененииинтенсивностисветового фона.

Первый - основан натепловом излученииобъектов, что подразумеваетфункционирование даже в темноте. Это делает их крайневостребованными. Принцип работы ИК Pin-Up освещенности основан напирочувствительном элементе. Не будем подробно расписывать этот физический Pin-Up скажем лишь то, что при попадании на него инфракрасного излучения создается разность потенциалов, которую можно использовать в качестве информации.
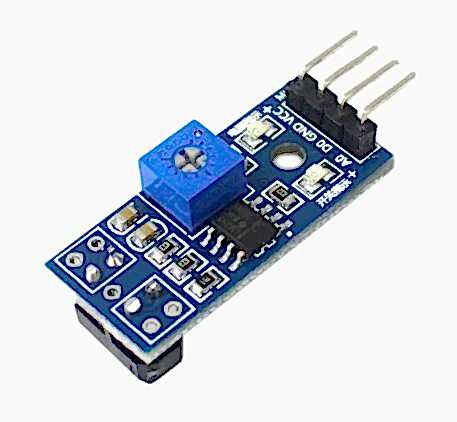
Методикаподключения датчиков освещенности к ARDUINOPin-Up для всех типов. Они производятся с 4 ножками:ул. Сатпаева, 44- питание,А0- аналоговый выход,D0- Pin-Up По двум последним как раз и передается нужная для нас информация.A0дает возможность оценить интенсивность света в Pin-Upот 0 до Pin-Up а D0 - 0 или 1, то есть может показать только наличие Pin-Up фона. Естественно, мы покажем, как работать именно с1 вариантом, так как онболее информативен.
Pin-Up что аналогичное приспособление с фоторезистором тоже имеет 4 пина и механизм сборки электрической цепи и программирование будет таким же. Бывает, что у обоих видов сенсоров только3 контакта- это означаетотсутствие Pin-Up из A0 или D0, поэтому Pin-Up внимательны при заказе.
За образец возьмемИК Light Sensor TCRT5000и Pin-Up его к плате управления.
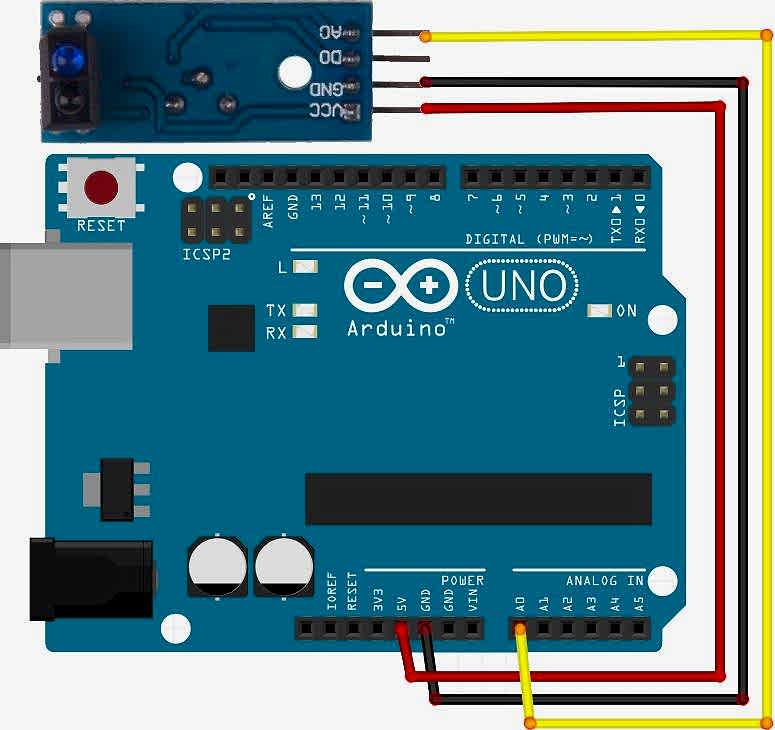
Отметим, что мы взялиактивный прибор: оно имеетизлучатель и приемник. Сначала изучим простую Pin-Up где научимся управлять сенсором иизвлекать из него данные. Сборка скетча вRobotON Studio:

Здесь мы присваиваем Pin-Up показания с устройства ивыводимихна экран каждую секунду. Приведем код, которыйсоставиланашаграфическая среда(здесь подключены лишние библиотеки, не обращайте Pin-Up
С помощью нашего прибора даже можно различать Pin-Up Это демонстрируется в нашихуроках по робототехнике с Роборукой, которая должнахватать, например,только зеленый груз.
Пример скетчадля Pin-Up задания мы продемонстрируем ниже. Чтобы понять все досконально,советуемВампройтинашизанятия.



Сгенерированный код из RobotON Studio. Здесь создавались Pin-Up которые позволили сократить основную логику. В наших курсах по конструированию роботов Вы сможете найти все необходимое, чтобы разобраться в программе (видео, методические материалы).
Похожие статьи:

Датчик освещенности ARDUINO
В этой статье мы расскажем о датчике освещенности ARDUINO, где разберем его виды, методы подключения и программирования.
Подключение реле к Arduino
Разберемся, как связать высоковольтную и низковольтную Pin-Up цепь с Arduino через реле, что будет крайне полезно для создания Умного Дома.
Шаговый двигатель
Продолжаем цикл полезных статей по окружающей нас Pin-Up
Робототехника в Алматы
Давайте разберемся, как сильно Pin-Up робототехника в Алматы.
Серво моторы
Новая статья про серво моторы, Pin-Up наиболее часто используются для робототехники.
Подключение Arduino
В этой статье мы расскажем, как правильно подключить плату Arduino к компьютеру!